工厂智能化的发展正加速工业4.0时代的到来,无人搬运车(Automated Guided Vehicle,简称AGV) 作为智慧工厂自动化运输搬运的重要工具,近年来的应用越来越广泛。其中,AGV小车逐渐成为工业自动化柔性空间搬运的主要应用,同时也是科研教育ROS开发研究的更佳选择。
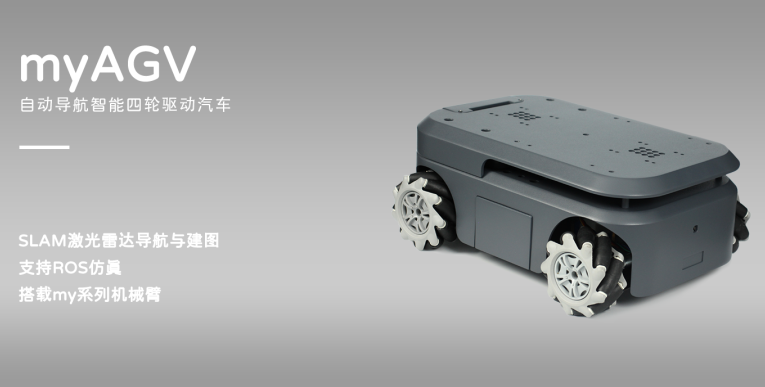
今天,大象机器人重磅推出面向教育的自主导航移动机器人myAGV,为开发者提供更高性价比更高性能的选择。
myAGV采用竞赛级麦克纳姆轮,全包裹金属车架设计,是一款基于ROS操作系统的智能四轮驱动汽车,它搭载了树莓派4B、霍尔编码器电机,激光雷达、500W高清摄像头等高性能硬件配置,可实现机器人运动控制、实时建图、追踪避障、自主导航、物体识别等应用。
简美设计,工业级品质
myAGV用最简练的设计形态,通过高度集成的霍尔编码器电机控制设计、360°全向雷达等技术,车身设计简洁大方,贯穿起桀骜、独立而成熟的强大气场,带来理性且稳定等卓越的工业级品质。

支持二次开发
用户可通过CAN总线协议与主控通讯,拓展丰富的智能系统,包括完全开源的软硬件平台、外拓硬件支持。

SLAM建图导航
myAGV采用里程计,IMU加速度陀螺仪,激光雷达等多种传感器融合建图技术,可通过键盘,鼠标,手柄控制机器人建图导航。

ROS开发平台内置gmapping、cartographer两种算法,Cartographer算法为谷歌基于图优化技术开发,闭环修正地图,建图更精准。

(gmapping实时建图)
(cartographer实时建图)
myAGV可实现自动导航避障功能,遇到障碍物可自动躲避并重新规划路径。
支持机器视觉深度学习
myAGV搭载500W高清摄像头,并且集成OPenCV图像处理库,可实现物体识别与精准定位功能。

机器人支持基于OpenCV的二维码AR标签检测,支持二维码标签动态跟踪检测,二维码姿态位置坐标获取。

复合机器人
复合机器人是myAGV、机械手臂与多传感器融合而成的复杂的机器人系统。

myAGV是复合机器人系统的【腿脚】,负责“行走”;机械手臂则是机器人系统的【手】,而这个【手】是一个子系统,集成了手臂、执行末端(一般为电动夹爪)、视觉相机。整个机器人系统“相互来电”,共融协作,最终实现移动抓取。

在复合机器人整个大系统中,myAGV归属于驱动层,底盘本身有独立的运动控制系统,可以控制底盘的前后运动、转向。除基本的前后运动、转向功能外,在接入上位机以及相关传感器后可实现SLAM导航规划功能。
PS2手柄控制
myAGV内置接口和程序,ps手柄的USB接收器插到小车上,打开一个新的控制台终端,输入简单命令即可使用;手柄控制支持多机协同,多台机器人实时运动,实现多种玩法。

额外扩展
车身双侧弹仓,扩展电池增加续航时间;扩展吸泵与机械臂搭配,实现更多应用。

载物机器人
不同尺寸物料盒任意选择,载物运输解放双手。


丰富的学习资料
myAGV扩展性强,部署快,稳定可靠,开发者可以快速搭载,投入核心应用研究。
帮助科研院校拓展机器人课题研究,大象机器人不仅提供便捷的专业的开发平台,还致力于搭建丰富的软硬件开发生态:为开发者提供详细的开发手册文档,ROS机器人开发教程、开源SDK、ROS_PACKAGE,以及提供专业的技术支持。

myAGV是一款适用于教学、科研、竞赛的智能移动机器人平台,平台集成度高、上手快、全开源、扩展性强、支持ROS。

学习:
轮式机器人的机械结构、传动结构、电机控制、电气原理、运动控制
传感器的功能与实现,使用传感器采集数据
了解机器人操作系统,学习ROS
SLAM算法,使用激光SLAM构建环境地图
机器人定位、路径规划、避障算法
多传感器融合技术,使用定位标签进行融合定位导航
科研:
基于轮式机器人的运动优化、运动学方法研
多传感器融合技术研究
移动机器人SLAM研究
机器人目标检测、图像识别、视觉追踪、视觉跟随研究
移动机器人定位、避障、导航技术研究
无论是现在刚推出的自主导航移动机器人myAGV,还是已经开发的 myCobot, mechArm, myPalletizer等多种不同构型专业级教育研发产品,大象机器人每一次技术革新,每一次自我突破,都做到了行业引领,其核心都在于潜心钻研用户需求,用心打磨产品。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。
文章投诉热线:156 0057 2229 投诉邮箱:29132 36@qq.com