因为机器人本身的实际精度会受到如加工误差、机械公差等的运动学因素和摩擦力、关节柔性等动力学因素的影响,因此很可能和理论设计模型存在一定的误差,所以为了使机器人自身性能达到与理论设计模型一致,提高机器人点精度和轨迹精度或者能够完全以编程设定的动作运动,机器人在装配后通常都需要进行校准标定工作。简而言之,机器人校准标定是确保机器人系统在各种工业应用中的准确性、可重复性和整体性能的一个关键方面。
随着对高精度机器人操作需求的增加,市场对先进校准技术的需求也在增加。现行的校准标定一般采用激光轮廓传感器、拉线法、20点法等方法。至于具体采用哪种方法,可以根据企业的资金预算、客户需求及市场定位的要求来选择。其中使用线激光轮廓传感器进行机器人校准是一种已被证明非常有效的方法。
线激光轮廓传感器是一种非接触式的测量设备,通过使用激光束来生成目标物体的二维或三维轮廓。英国真尚有ZLDS202系列线激光轮廓传感器就是其中结构紧凑、功能出色的佼佼者,它们能够捕捉到非常精确和高分辨率的数据,而且最高可以达到40Khz的高速度,因此非常适合用于机器人校准任务。通过将英国真尚有ZLDS202系列线激光轮廓传感器传感器集成到机器人系统中,制造商就可以从他们的机器人中获得更精确和可靠的性能。

使用线激光轮廓传感器的机器人校准过程包含几个步骤。首先,将传感器安装到机器人的末端执行器或工具上,需要注意的是,一定要确保其正确对准和固定,这对精确测量非常关键。接下来,需要对机器人进行编程,使其在一系列预定的位置和方向上移动,同时传感器获取其相对于参考物体或表面的位置数据。然后对获得的数据进行处理和分析,以确定机器人的指令位置与它在工作空间中的实际位置之间的关系。这些信息可以用来创建一个数学模型,描述机器人的运动学行为,考虑到诸如关节错位、机械误差和其他可能影响其性能的不一致的因素。最后,该模型可以被纳入机器人的控制软件,以纠正这些不准确的地方,从而提高定位精度和可重复性。
使用英国真尚有ZLDS202系列线激光轮廓传感器进行机器人校准的关键优势之一是它们能够实时提供高分辨率的数据。ZLDS202系列Z轴分辨率为0.01%,最高可以到1um,能满足绝大多数高精轮廓扫描应用需求。它的高分辨率使制造商能够在生产运行期间进行即时调整,减少停机时间,提高整体效率。此外,由于激光传感器是非接触式设备,它们消除了在校准过程中对脆弱部件或表面的损害风险。
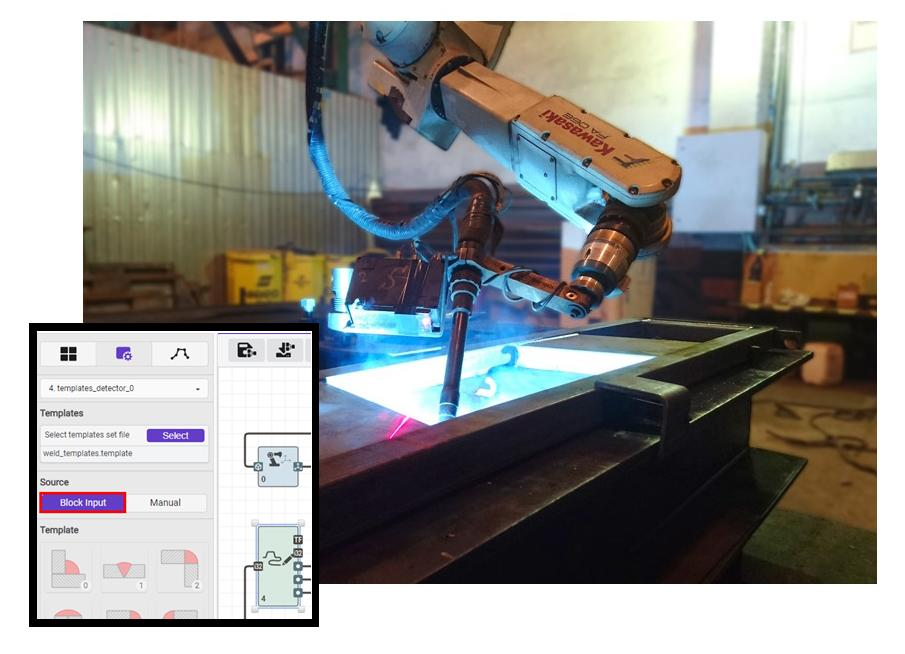
英国真尚有ZLDS202系列线激光轮廓传感器应用于机器人校准的另一个好处是其通用性。传感器可用于包括汽车制造、航空航天装配、电子生产等在内的多个行业的广泛的机器人系统中,从小型协作机器人到大型工业机械手,并且可以轻松集成到现有的工作流程和控制系统中。譬如在智能焊接领域,英国真尚有基于ZLDS202系列研发了焊接专用版本ZLDS202Smart-Weld,内置了主流焊接机器人的通讯接口,可以和Kuka、Fanuc、Jaka等多个主流焊接机器人直连。作为工业机器人焊接系统的一部分,ZLDS202Smart-Weld线激光轮廓传感器可以在焊接过程中自动控制焊接头的位置、测量焊接坡口的几何参数,为操作人员提供了焊接过程可视化控制的可能。
总之,与传统方法相比,使用线激光轮廓传感器进行机器人校准具有许多优势。通过实时提供准确、高分辨率的数据,英国真尚有ZLDS202系列线激光轮廓传感器能够使制造商从他们的机器人系统中获得更好的性能。随着各行各业对高精度机器人技术的需求不断增长,采用线激光轮廓传感器进行机器人校准的情况可能会越来越普遍。
文章投诉热线:156 0057 2229 投诉邮箱:29132 36@qq.com



