本次论文由DeepWay深向智能驾驶研发团队精心撰写,题为《Real-time Optimization-based Path Planning for Autonomous Semi-trailer Trucks》(基于优化的自主半挂卡车实时路径规划)。在会议期间,DeepWay深向智能驾驶技术研发中心副总监丁峰与众多专家学者齐聚一堂,共同分享了这一研究成果。
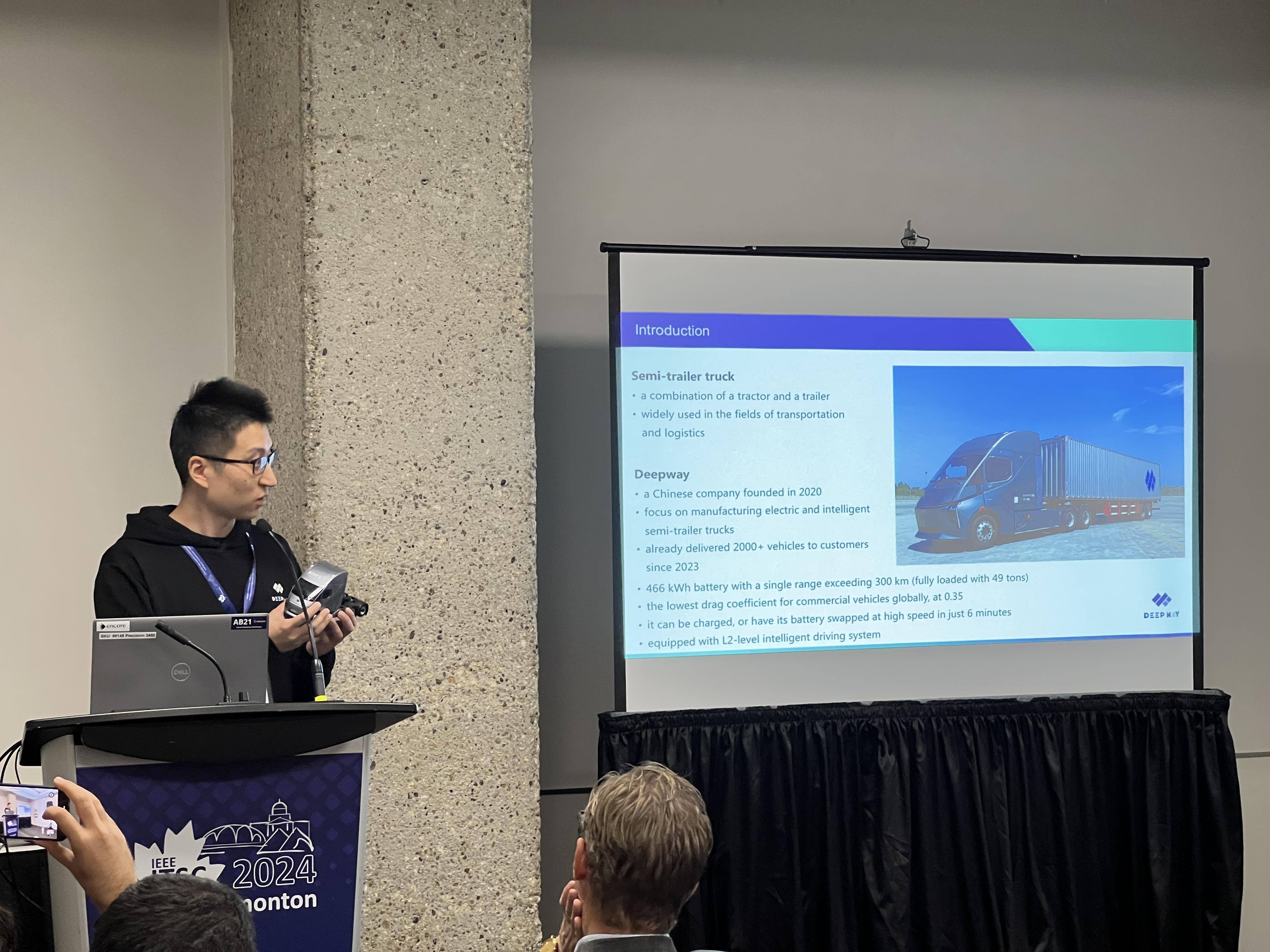
该论文针对半挂卡车复杂的动力学特性,提出了一种新颖的基于实时优化的路径规划方法,使得卡车能够在满足安全的前提下尽可能居中行驶,并能够充分利用地形,提升通过性。这种方法涉及对整个系统进行精确的建模,包括所有车轮和角点的位置,以实现更精确的路径规划,同时也需要满足模型的复杂程度不会影响到实时的求解。对此,团队构建了一个具有硬约束和软约束结合的优化问题,这能够使卡车确保无碰撞并尽可能居中,但是也允许车轮在某些情况下 (如急弯或狭窄道路) 暂时超出车道边界,从而提高其通过能力。
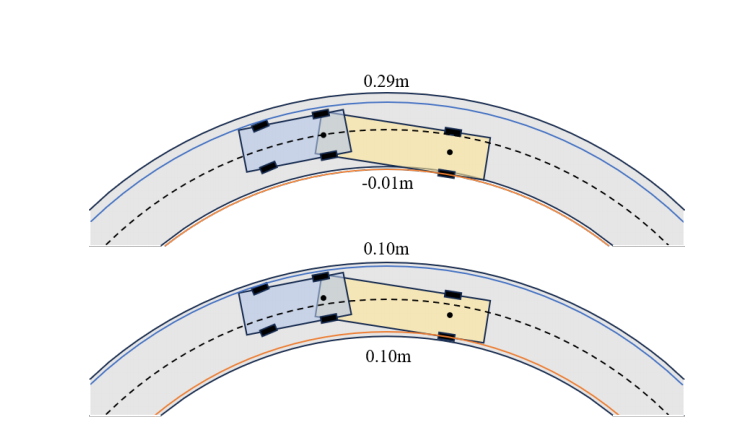
半挂卡车的理想行驶路径,是使牵引车和挂车总体上位于车道的最中心。上图的上半部分为一般乘用车的路径规划方法,使车的后轴中心沿着道路中心行驶,如虚线所示。但对半挂卡车来说,如橙色线代表的挂车扫过的最左侧轮廓,就超出了道路边界。上图下半部分为DeepWay深向车辆的行驶路径,DeepWay深向车辆的后轴中心有意略微偏向道路中心的右侧,这是使牵引车与挂车的总体更位于道路的中心。
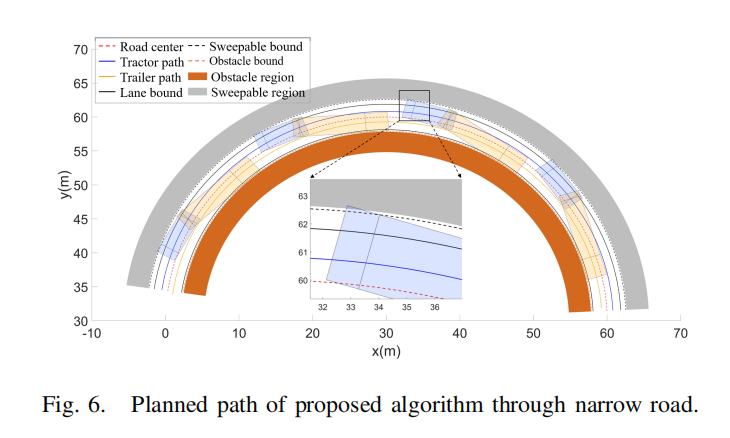
下图为一个复杂的窄路通行案例,外侧灰色的是低矮障碍物如路沿,内侧橙色的为不可碰撞的障碍物如锥桶。当半挂卡车转弯时,挂车会倾向于内切,可能会越过车道标线,特别是在急转弯的道路上。DeepWay深向智驾团队提出的方法能够将牵引车战略性地向外侧行驶,允许前悬的一部分扫过路沿而不影响安全。这种操作有效地利用了路沿的地形,既防止了与内侧锥桶的碰撞,又防止了牵引车的前轮压在路沿上。
此次,IEEE ITSC会议上DeepWay深向智驾团队向各位专家学者展示了全新基于实时优化的道路半挂卡车路径规划方法。大量的模拟和实际实验证明了DeepWay深向智驾团队提出的方法具备有效性与实时性,在避障和车道居中方面显著改善了车辆行为,赢得了与会嘉宾、学者的广泛关注。
硬核的专业实力屡获认可,产品落地进程不断加速。在卡车智能驾驶的探索道路上,DeepWay深向未来还会给我们哪些惊喜?让我们拭目以待!