1959 年,诺贝尔奖得主、理论物理学家理查德·费曼发出石破天惊的前瞻之语:“将外科医生吞下”。多年后的今天,微纳机器人的出现使他的话逐渐成为现实。它们能够精准针对传统药物递送方式现存的利用率低、副作用大、难以精准到达病灶等问题,提供新的解决思路。
复旦大学智能机器人与先进制造创新学院白辰瑶副研究员团队(以下简称“团队”)常年关注磁控微纳机器人 / 血管介入机器人领域,针对微纳机器人 / 血管介入机器人在精准医疗应用方面面临的主要科学问题进行了多项创新研究,尤其在微纳机器人群体通信系统优化、差错控制、群体感应等领域,以及机器人单体运动过程中的动力学建模、驱动控制等研究方面取得了系列成果。
1 磁性微纳机器人驱动与功能一体化设计
在微纳机器人构型方面,团队首创了单一旋转磁场下的驱动抓取一体化设计,提出了磁性螺旋型机器人微爪这一创新结构(图 1)。这项突破性成果解决了现有夹持结构在后退运动中容易引起载荷从孔口脱落而导致机器人运动灵活性不足的关键问题,同时攻克了机器人驱动与载荷抓取释放需多种物理场介入而引起的复杂性难题。这一创新设计为扇贝型机器人的磁控壳体与微阀导流功能集成提供了重要的技术原型。
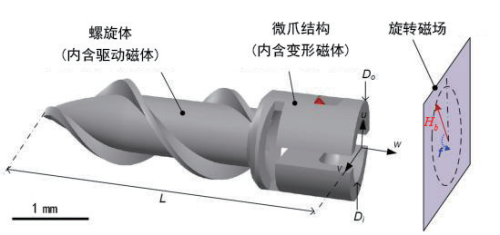
图 1 磁性螺旋型机器人微爪
基于所提出的螺旋型机器人微爪,团队采用有限元方法构建了面向机器人螺旋推进与微爪结构开闭的流体动力学模型,深入进行了微纳机器人表面流场与运动规律分析,并通过实验验证了理论分析的有效性,为后续的 ALE 流固耦合建模提供了坚实的方法论支持。同时,团队结合固体力学分析与数值计算方法,深入研究了磁性螺旋型机器人微爪在静态和动态磁场下的变形以及运动规律,成功揭示了微爪纵向与横向位移运动的内在机理(图 2 左)。
针对柔性连续体机器人(图 2 右),团队进一步将其应用于心脑血管介入治疗这一重大挑战。传统介入手术依赖无源导丝,在脑部等狭窄、弯曲的血管中操控性差,易引发创伤并带来辐射暴露风险。为攻克这一难题,他们提出了一种新型锥形磁控软体连续机器人(T-MSCR),其微型化的尖端使其能深入复杂微血管。T-MSCR 由NdFeB 磁性微粒与柔性聚二甲硅氧烷(PDMS)聚合物复合而成,其卓越性能源于几何与磁化统一优化策略。
该策略将高精度的物理建模与智能优化算法相结合,对机器人的几何形状与内部磁颗粒的离散分布进行系统性寻优。
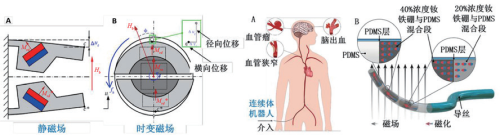
图 2 微爪在静磁场与动态时变磁场下的位移模型(左)以及新型变截面、多段式磁性柔性连续体微机器人(右)
2 微纳机器人群体通信系统的理论突破与建模创新
针对微纳机器人群体间通信链路的关键科学问题,团队综合考虑血液流场与布朗运动等复杂因素,建立了全新的微纳机器人释放、传输、接收与码间干扰噪声模型。
这一模型系统深入分析了机器人个体运动学、动力学行为以及个体间相互作用机理,为扇贝型微纳机器人流体力学解析奠定了理论基础。该研究成果获得了纳米通信领域创始人 B. Akan 教授等专家的高度评价,认为团队所提出的差错控制编码在编码率与能量效率间获取有效平衡方面具有很强的创新性。
在数据驱动建模与优化方面,团队基于磁性细菌型微纳机器人通信系统,构建了磁性微纳粒子磁响应模型。针对该模型在实际场景中涉及的建模复杂性难题,提出了多种基于数据驱动的系统建模方法(图 3),成功建立了描述微纳机器人在低雷诺数流体环境中的通用通信系统模型。这些创新方法包括基于改进的时域卷积网络、基于 Transformer 模型的方法和基于进化生成对抗网络EGAN 的端到端学习方法。
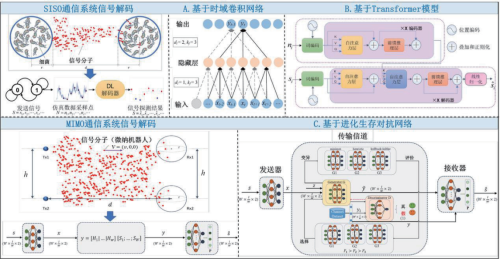
图 3 基于磁性微纳机器人通信系统的数据驱动建模方法
同时,团队针对磁性连续体机器人,创新采用遗传算法、粒子群算法、灰狼算法等智能优化方法来优化机器人不同位置的磁性颗粒浓度,从而显著增强其偏转性能。相关方法可有效迁移至非牛顿流体中的磁控与流变协同调控场景,为微纳机器人在血液等复杂生理流体环境中的精准控制提供了技术路径。上述研究成果荣获2022 年中国自动化学会自然科学奖二等奖。
3 实验平台与复杂环境验证体系创新构建
在实验平台搭建与实验验证方面,团队已成功搭建了集观测、驱动、反馈控制于一体的磁控微纳机器人操作平台(图 4 左),并开发了完整的系统控制软件。
该平台配备有高精度运动控制平台、光学显微镜基恩士VK-X1000、自研激光共聚焦显微镜等国际领先水平的实验设备。此外,还配备了 2500 V 充磁电压的充磁设备,可为磁性微纳机器人提供所需的磁化条件,且配备的大型仪器共享平台拥有扇贝型微纳机器人制备所需的大面积柔性三维光刻设备Nanoscribe Photonic Pessional,分辨率达 150 nm。
团队设计了模拟复杂血管环境的实验模型,系统评估了磁性连续体机器人在外部磁场引导下的磁转向和路径选择性能(图 4 右)。实验结果验证了机器人在多分叉环境中的高效导航和偏折能力,成功实现了 1:1 人体颅内血管模型的实验验证。
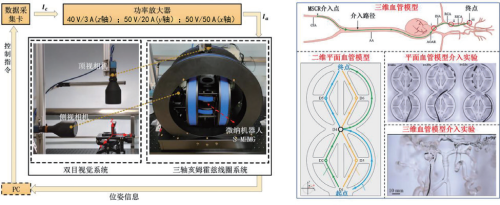
图 4 磁性微纳机器人一体化驱动控制平台(左)与复杂约束环境下的磁驱动实验验证(右)
团队所在智能医疗机器人实验室占地面积为 150m² ,拥有复杂环境下微纳机器人驱动控制实验验证所需的小血管模型、全套 1:1 颅内及心血管模型,并研发了导丝 / 导管介入手术机器人系统,负责磁导丝的夹持、旋转、往复运动。这些研究平台可为项目提供全面的实验设备和环境,满足扇贝型微纳机器人制备、模型化、基本力学和磁学性能测试、磁场驱动调控及整体测试的需求。综上,团队在基于细菌型和螺旋型微纳机器人与磁性连续体机器人的靶向给药系统研究,以及微流体力学理论、复杂系统建模与控制技术研究方面具有良好的研究基础和工作积累。
4 社会经济效益与未来展望
对于医疗和健康行业而言,磁性微纳机器人送药技术将成为一项“省钱又省事”的新技术。传统药物递送模式中,药物大量在体内非靶向部位分布,真正到达病灶、发挥作用的只有较少部分,不仅造成浪费,其他作用于正常组织部位的药物还可能引发强烈的副作用。磁性微纳机器人送药技术类似于在药物递送机器人上安装了“GPS”,可以直奔需要治疗的病灶,准确送达药物。
这一技术带来的增益十分明显:节省药物,避免浪费,从而降低治疗费;药物集中在病灶发挥作用,从而使疗效更好,副作用也更小,可谓一举多得。特别是在肿瘤治疗、心血管疾病治疗等重大疾病的治疗上,磁性微纳机器人送药技术研究将带来新的曙光。
此类重大疾病的传统治疗常常大量使用化疗药物,这会损伤正常组织,导致患者掉头发、恶心呕吐、身体虚弱,严重影响生活质量。而磁性微纳机器人送药技术能够通过药物的精准递送和定点释放,实现对病灶的“精准点对点打击”,使病人的生活质量提升,自然依从性也会增强。
团队在磁性微纳机器人领域的成果不仅仅意味着对更高经济效益的追求,同时是科研人对社会责任的有力承担。团队的成果不仅提升了我国在生物医学工程领域的国际学术影响力,也为推动相关产业的发展和技术转化提供了重要支撑。微纳机器人技术代表了精准医疗未来可行的发展方向,而加强与临床医学的合作,推进微纳机器人技术从实验室走向临床应用,将是下一阶段的重要任务。
从 1959 年理查德·费曼的超前构想开始,到今天中国研究者能够操控纳米级别的微型机器人在人体血管中自由穿行,人类对微观世界的探索从未停止。团队在微纳机器人群体通信系统优化、磁场驱动控制、流体力学建模等方面的深厚积累,以及完善的实验平台和跨学科研究环境,为未来研究的深入开展提供了有力保障。 磁性微纳机器人技术的发展,不仅是科学技术的进步,更是人类对抗疾病、追求健康生活的希望所在。
专家简介
白辰瑶,博士,复旦大学智能机器人与先进制造创新学院青年副研究员。多年来,一直从事微纳机器人及相关领域的基础性研究工作,研究方向涵盖微纳机器人集群通信系统、磁性微纳机器人单体驱动控制以及磁性连续体微机器人运动控制等。近年来,针对微纳机器人在药物递送系统应用面临的主要科学问题进行了多项创新研究,尤其在微纳机器人群体通信系统优化、差错控制、群体感应等领域,以及机器人单体运动过程中的动力学建模、驱动控制等研究方向上积累了一定的研究经验。主持省部级项目 4 项, 在 IEEE Transactions on Cybernetics、 IEEE Robotics and Automation Letters、 IEEE Transactions on NanoBioscience、IEEE Communications Letters 等 SCI 期刊发表论文 20 余篇,其中以第一作者或通信作者发表 SCI 期刊论文 14 篇。参与编写专著 1 部。获得 2022 年中国自动化学会自然科学奖二等奖。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。