
随着器件和信号处理技术的突破,激光雷达技术将从强度(Amplitude Modulation,AM)向频率调制(Frequency Modulation,FM)演进。FMCW激光雷达将雷达信号处理技术与激光调制解调技术结合,不再是简单的对激光脉冲进行计时,这样解决了传统TOF激光雷达抗干扰能力差、探测维度低的问题(传统激光雷达相对微波雷达缺乏多普勒图像探测能力)。体现在应用上:1、彻底解决太阳光干扰、恶意干扰、激光雷达间串扰等安全隐患。2、能够在雨、沙尘等恶劣天气下工作。3、可凭借几个点就能实时检测200米外的运动目标(摄像头多帧图像无法做到)。目标的运动信息可用于区分目标敏感度以及预测目标运动方向,革命性的提高了自动驾驶的目标感知与分拣能力。
相比于毫米波,FMCW激光雷达工作在激光载波,其成像效果和目标反射特征更接近于人眼识别效果,工作过程中不会受到路边金属物(路边停放的车量、金属果皮箱、建筑物拐角)的干扰。
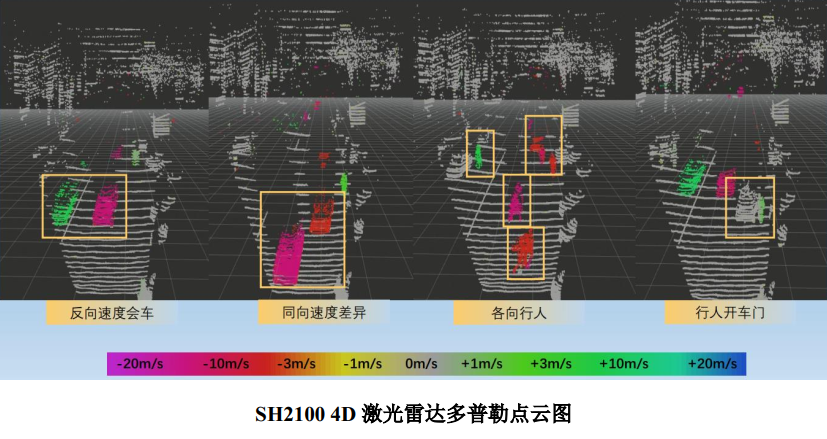
光勺科技发布的4D 相干多普勒激光雷达SH2100采用了专利的编码调制和自零差解调技术,避免了对激光光源调制线性度的依赖,大幅降低了系统的复杂度并提升了稳定性。在路测效果上,SH2100利用多普勒视角揭示了其在自动驾驶领域的革命性效果,解决了复杂场景下传统感知技术对“非法”动目标的识别问题。下图为SH2100的多普勒点云图,图中使用不同的颜色表示了不同矢量速度的运动目标。
下图-a(相机效果),图中红圈区为2辆逆行的摩托车,场景中由于摩托车位置较远(100m),同时存在银色轿车和路边杂物(树木、灯杆、共享单车)干扰,传统技术无法对2辆逆行的物体进行有效识别。下图-b,为同一时刻SH2100得到的4D多普勒图像,在激光多普勒维度下清晰的捕获到2个“绿色”的运动目标(多普勒蓝移)。
下图-c为逆行目标接近雷达设备(10m)时的相机成像效果,由于出租车的遮挡,相机图像或毫米波已无法发现隐藏在出租车后的逆行驶摩托。SH2100具备全回波的目标多普勒探测能力,发射的激光穿透出租车车窗玻璃获得目标的距离和多普勒图像,革命性的提高了自动驾驶动目标识别与分类能力。

正因FMCW激光雷达具有独特的成像效果(具备毫米波和激光的双重探测优势)与极高的技术门槛,属于自动驾驶领域的革命性技术,导致目前FMCW激光雷达成为几家大型厂商的“御用产品”,可公开使用和销售的产品寥若晨星。光勺科技的SH2100 4D相干多普勒激光雷达在2020年CES首度亮相,为推进自动驾驶快速发展,光勺科技将在2020Q1向广大自动驾驶公司和车厂提供样机试用和免费的多普勒路测数据,并将于2020年Q3~2020年Q4将第一批SH2100产品交付用户。
文章投诉热线:156 0057 2229 投诉邮箱:29132 36@qq.com



