煤矿井下具有作业空间狭小、作业设备多、视觉环境差、环境温度高的特点,是煤矿矿井安全事故的多发地点,而在煤矿井下安全事故中,多数原因在于监测不到位而引起,因此, 煤矿安全巡检工作对保障煤矿安全生产至关重要。
针对煤矿井下特殊的环境,山东国兴智能科技股份有限公司自主研发的井下履带式探测机器人开始投入使用。

MA、KA双证认证。应用于煤矿井下的巡检设备井下履带式探测机器人凭借其优秀的产品品质与出色的产品性能,一次性通过爬坡、越障、气体检测、信号传输强度等认证检测,成为了国内通过双证认证的煤矿井下探测机器人之一。

根据实际环境,打造解决方案。
煤矿井下的地面具有坑洼不平、坡度大等复杂性,机器人采用六履带摆臂式结构,通过机器人四支臂角度调整,大幅度提升机器人在煤矿井下复杂地面的通过性与越障性。
井下工作平台远离地面,环境恶劣,存在地上地下沟通不便等问题,导致工作环境监测不利。通讯滞后等问题发生,影响到生产安全与应急救援。对此,机器人搭载各类检测传感器,地面工作人员可在地上远程操控地下机器人,能够实时、直观地对井下有毒有害物质进行快速检测和环境监测,做到及时发现事故苗头,防患于未然。
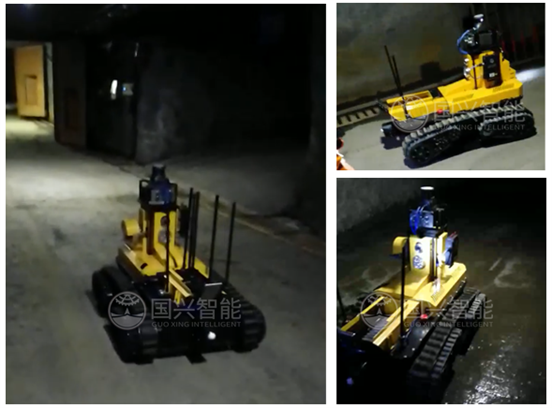
矿下应用实景
其次,机器人装配数字化摄像设备,改变以往模拟视频监控所产生的衰耗、畸变、延时、易受井下各种设备干扰、图像质量下降等影响,能够确保将目标区域图像数据等实时、准确地传输到地面控制中心。
此外,针对恶劣环境、传输距离长等因素影响信号传输,机器人可搭载矿用车载式无线基站,在信号较弱及信号存在严重遮挡时实现无人化的自动抛投,重建通信链路,确保机器人在井下复杂多样的环境中信号传输通畅度与强度,机器人在大柳塔实验矿实测了点对点通讯距离能达到1200米以上。
通讯畅通,不仅可以做到减少事故隐患、确保生产安全,也能为救援工作提供直接数据参考,确保救援安全有序地进行,还可以为事后事故原因调查与分析提供有关的图像资料。

国兴智能加大研发力度,研发出适用于煤矿井下特殊环境的巡检机器人,提高煤矿安全管理水平,推动煤矿智能化发展,让煤矿安全管理工作向科学化、规范化、数字化管理轨道迈进。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。
文章投诉热线:156 0057 2229 投诉邮箱:29132 36@qq.com



